Передмова
Знадобилось мені в одному проекті вести запис всіляких подій у файл. Просто короткі текстові рядки з датою/часом і що за подія відбулась. Тому максимально просто і не заморочувався з DMA. Бібліотека FATFS є в комплекті з CubeMX, а ось вже як саме буде працювати мікроконтролер з флешкою по шині SPI на рівні залізяччя, треба вже потурбуватись самому. І дописати декілька функцій в заздалегідь призначених для цього місцях. Ідею поцупив звідси. Дуже стисло поділюсь з вами робочим прикладом. Хто захоче розібратись детально, то вже користуйтесь пошуком.
Залізяччя для макету
- Плата "Синя пігулка" з чипом STM32F103C8T6
- Програматор ST-Link v2
- MicroSD SPI Card Adapter
- Флешка MicroSD
- Світлодіод будь якого кольору + резистор на 56 - 220 Ом
Схема макету
Зробіть з'єднання відповідно до схеми:
 |
| Макет для тестування |
Клацайте на зображення щоб збільшити.
CubeMX for STM32
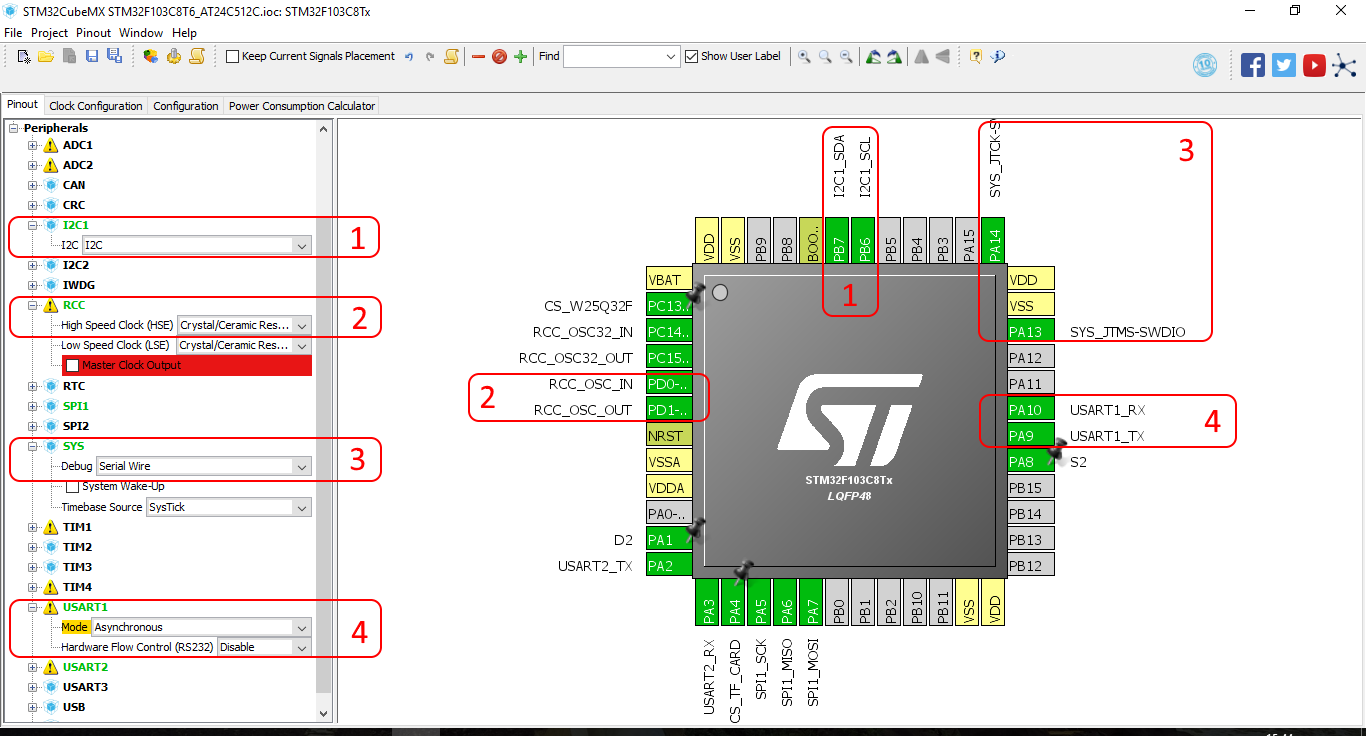
Запускаємо CubeMX, обираємо свій чип і робимо налаштування:
 |
| Налаштування вкладки pinout |
- Додаємо до проекту бібліотеку FATFS
- Вмикаємо тактування від зовнішнього кварцового резонатору
- Вмикаємо Debug - Serial Wire
- Вмикаємо SPI2
- Та не забуваємо налаштувати PB12 на вихід GPIO_Output і надати ім'я "CS_SD_CARD", а також PB1 на вихід GPIO_Output і надати ім'я "LED_RED"
Переходимо до вкладки "clock configuration" і робимо так як на малюнку:
 |
| Налаштування вкладки clock configuration |
Всі інші налаштування за замовчуванням, нічого не міняв.
Надаємо ім'я своєму проекту "STM32F103C8_SD_CARD_DEMO", вказуємо шлях, засіб розробки та генеруємо код.
Код для роботи FATFS по SPI
Відкриваємо в своєму засобі розробки згенерований CubeMX проект "STM32F103C8_SD_CARD_DEMO". Та перш за все навчимо бібліотеку FATFS працювати з нашою SD Card по шині SPI. Відкриваємо файл "user_diskio.h" і в секцію /* USER CODE BEGIN 0 */ такі рядки:
- #define SPI hspi2
- extern SPI_HandleTypeDef SPI;
- void sdcard_systick_timerproc(void);
Надалі, для зручності буду додавати весь код в користувацьких секціях і функціях де необхідно зробити зміни.
Ось так буде виглядати секція "USER CODE 0" у файлі "user_diskio.h" з нашим кодом:
/* USER CODE BEGIN 0 */ #define SPI hspi2 /* Includes ------------------------------------------------------------------*/ /* Exported types ------------------------------------------------------------*/ extern SPI_HandleTypeDef SPI; /* Exported constants --------------------------------------------------------*/ /* Exported functions ------------------------------------------------------- */ extern Diskio_drvTypeDef USER_Driver; /*-----------------------------------------------------------------------*/ /* Device Timer Interrupt Procedure (Platform dependent) */ /*-----------------------------------------------------------------------*/ /* This function must be called in period of 1ms */ void sdcard_systick_timerproc(void); /* USER CODE END 0 */
Далі відкриваємо файл "user_diskio.c" і до секції "/* USER CODE DECL */" вносимо необхідні визначення, змінні, функції.
Секція "/* USER CODE DECL */" в файлі "user_diskio.c" тепер буде виглядати так:
/* USER CODE BEGIN DECL */ /* Includes ------------------------------------------------------------------*/ #include <string.h> #include "ff_gen_drv.h" #include "user_diskio.h" #include "stdbool.h" /* Private typedef -----------------------------------------------------------*/ /* Private define ------------------------------------------------------------*/ /* Definitions for MMC/SDC command */ #define CMD0 (0x40+0) /* GO_IDLE_STATE */ #define CMD1 (0x40+1) /* SEND_OP_COND */ #define CMD8 (0x40+8) /* SEND_IF_COND */ #define CMD9 (0x40+9) /* SEND_CSD */ #define CMD10 (0x40+10) /* SEND_CID */ #define CMD12 (0x40+12) /* STOP_TRANSMISSION */ #define CMD16 (0x40+16) /* SET_BLOCKLEN */ #define CMD17 (0x40+17) /* READ_SINGLE_BLOCK */ #define CMD18 (0x40+18) /* READ_MULTIPLE_BLOCK */ #define CMD23 (0x40+23) /* SET_BLOCK_COUNT */ #define CMD24 (0x40+24) /* WRITE_BLOCK */ #define CMD25 (0x40+25) /* WRITE_MULTIPLE_BLOCK */ #define CMD41 (0x40+41) /* SEND_OP_COND (ACMD) */ #define CMD55 (0x40+55) /* APP_CMD */ #define CMD58 (0x40+58) /* READ_OCR */ #define SELECT() HAL_GPIO_WritePin(CS_SD_CARD_GPIO_Port, CS_SD_CARD_Pin, GPIO_PIN_RESET) #define DESELECT() HAL_GPIO_WritePin(CS_SD_CARD_GPIO_Port, CS_SD_CARD_Pin, GPIO_PIN_SET) /* Private variables ---------------------------------------------------------*/ /* Disk status */ static volatile DSTATUS Stat = STA_NOINIT; static BYTE CardType; /* b0:MMC, b1:SDC, b2:Block addressing */ static BYTE PowerFlag = 0; /* indicates if "power" is on */ static volatile BYTE Timer1, Timer2; /* 100Hz decrement timer */ static void xmit_spi(BYTE Data) { while (HAL_SPI_GetState(&SPI) != HAL_SPI_STATE_READY); HAL_SPI_Transmit(&SPI, &Data, 1, 5000); } static BYTE rcvr_spi(void) { unsigned char Dummy, Data; Dummy = 0xFF; Data = 0; while ((HAL_SPI_GetState(&SPI) != HAL_SPI_STATE_READY)); HAL_SPI_TransmitReceive(&SPI, &Dummy, &Data, 1, 5000); return Data; } static void rcvr_spi_m(BYTE *dst) { *dst = rcvr_spi(); } /*-----------------------------------------------------------------------*/ /* Wait for card ready */ /*-----------------------------z------------------------------------------*/ static BYTE wait_ready(void) { BYTE res; Timer2 = 50; rcvr_spi(); do res = rcvr_spi(); while ((res != 0xFF) && Timer2); return res; } static bool rcvr_datablock(BYTE *buff, /* Data buffer to store received data */ UINT btr /* Byte count (must be even number) */ ) { BYTE token; Timer1 = 10; do { /* Wait for data packet in timeout of 100ms */ token = rcvr_spi(); } while ((token == 0xFF) && Timer1); if (token != 0xFE) return false; /* If not valid data token, retutn with error */ do { /* Receive the data block into buffer */ rcvr_spi_m(buff++); rcvr_spi_m(buff++); } while (btr -= 2); rcvr_spi(); /* Discard CRC */ rcvr_spi(); return true; /* Return with success */ } /*-----------------------------------------------------------------------*/ /* Send a data packet to MMC */ /*-----------------------------------------------------------------------*/ #if _READONLY == 0 static bool xmit_datablock(const BYTE *buff, /* 512 byte data block to be transmitted */ BYTE token /* Data/Stop token */ ) { BYTE resp, wc; uint32_t i = 0; if (wait_ready() != 0xFF) return false; xmit_spi(token); /* Xmit data token */ if (token != 0xFD) { /* Is data token */ wc = 0; do { /* Xmit the 512 byte data block to MMC */ xmit_spi(*buff++); xmit_spi(*buff++); } while (--wc); rcvr_spi(); rcvr_spi(); while (i <= 64) { resp = rcvr_spi(); /* Reveive data response */ if ((resp & 0x1F) == 0x05) /* If not accepted, return with error */ break; i++; } while (rcvr_spi() == 0) ; } if ((resp & 0x1F) == 0x05) return true; else return false; } #endif /* _READONLY */ static void power_on(void) { unsigned char i, cmd_arg[6]; unsigned int Count = 0x1FFF; DESELECT(); for (i = 0; i < 10; i++) xmit_spi(0xFF); SELECT(); cmd_arg[0] = (CMD0 | 0x40); cmd_arg[1] = 0; cmd_arg[2] = 0; cmd_arg[3] = 0; cmd_arg[4] = 0; cmd_arg[5] = 0x95; for (i = 0; i < 6; i++) xmit_spi(cmd_arg[i]); while ((rcvr_spi() != 0x01) && Count) Count--; DESELECT(); xmit_spi(0XFF); PowerFlag = 1; } static void power_off(void) { PowerFlag = 0; } /*-----------------------------------------------------------------------*/ /* Send a command packet to MMC */ /*-----------------------------------------------------------------------*/ static BYTE send_cmd(BYTE cmd, /* Command byte */ DWORD arg /* Argument */ ) { BYTE n, res; if (wait_ready() != 0xFF) return 0xFF; /* Send command packet */ xmit_spi(cmd); /* Command */ xmit_spi((BYTE) (arg >> 24)); /* Argument[31..24] */ xmit_spi((BYTE) (arg >> 16)); /* Argument[23..16] */ xmit_spi((BYTE) (arg >> 8)); /* Argument[15..8] */ xmit_spi((BYTE) arg); /* Argument[7..0] */ n = 0; if (cmd == CMD0) n = 0x95; /* CRC for CMD0(0) */ if (cmd == CMD8) n = 0x87; /* CRC for CMD8(0x1AA) */ xmit_spi(n); /* Receive command response */ if (cmd == CMD12) rcvr_spi(); /* Skip a stuff byte when stop reading */ n = 10; /* Wait for a valid response in timeout of 10 attempts */ do res = rcvr_spi(); while ((res & 0x80) && --n); return res; /* Return with the response value */ } static int chk_power(void) /* Socket power state: 0=off, 1=on */ { return PowerFlag; } /*-----------------------------------------------------------------------*/ /* Device Timer Interrupt Procedure (Platform dependent) */ /*-----------------------------------------------------------------------*/ /* This function must be called in period of 1ms */ void disk_timerproc(void) { uint8_t n; n = Timer1; /* 100Hz decrement timer */ if (n) Timer1 = --n; n = Timer2; if (n) Timer2 = --n; } volatile unsigned short int sdcard_timer; void inline sdcard_systick_timerproc(void) { ++sdcard_timer; if (sdcard_timer >= 10) { sdcard_timer = 0; disk_timerproc(); } } /* USER CODE END DECL */
А далі вносимо зміни до функцій в файлі user_diskio.c:
- DSTATUS USER_initialize (BYTE pdrv);
- DSTATUS USER_status (BYTE pdrv);
- DRESULT USER_read (BYTE pdrv, BYTE *buff, DWORD sector, UINT count);
- DRESULT USER_write (BYTE pdrv, const BYTE *buff, DWORD sector, UINT count);
- DRESULT USER_ioctl (BYTE pdrv, BYTE cmd, void *buff);
Функція USER_initialize:
/** * @brief Initializes a Drive * @param pdrv: Physical drive number (0..) * @retval DSTATUS: Operation status */ DSTATUS USER_initialize ( BYTE pdrv /* Physical drive nmuber to identify the drive */ ) { /* USER CODE BEGIN INIT */ BYTE n, ty, ocr[4]; if (pdrv) return STA_NOINIT; /* Supports only single drive */ if (Stat & STA_NODISK) return Stat; /* No card in the socket */ power_on(); /* Force socket power on */ //send_initial_clock_train(); SELECT(); /* CS = L */ ty = 0; if (send_cmd(CMD0, 0) == 1) { /* Enter Idle state */ Timer1 = 100; /* Initialization timeout of 1000 msec */ if (send_cmd(CMD8, 0x1AA) == 1) { /* SDC Ver2+ */ for (n = 0; n < 4; n++) ocr[n] = rcvr_spi(); if (ocr[2] == 0x01 && ocr[3] == 0xAA) { /* The card can work at vdd range of 2.7-3.6V */ do { if (send_cmd(CMD55, 0) <= 1 && send_cmd(CMD41, 1UL << 30) == 0) break; /* ACMD41 with HCS bit */ } while (Timer1); if (Timer1 && send_cmd(CMD58, 0) == 0) { /* Check CCS bit */ for (n = 0; n < 4; n++) ocr[n] = rcvr_spi(); ty = (ocr[0] & 0x40) ? 6 : 2; } } } else { /* SDC Ver1 or MMC */ ty = (send_cmd(CMD55, 0) <= 1 && send_cmd(CMD41, 0) <= 1) ? 2 : 1; /* SDC : MMC */ do { if (ty == 2) { if (send_cmd(CMD55, 0) <= 1 && send_cmd(CMD41, 0) == 0) break; /* ACMD41 */ } else { if (send_cmd(CMD1, 0) == 0) break; /* CMD1 */ } } while (Timer1); if (!Timer1 || send_cmd(CMD16, 512) != 0) /* Select R/W block length */ ty = 0; } } CardType = ty; DESELECT(); /* CS = H */ rcvr_spi(); /* Idle (Release DO) */ if (ty) /* Initialization succeded */ Stat &= ~STA_NOINIT; /* Clear STA_NOINIT */ else /* Initialization failed */ power_off(); return Stat; /* USER CODE END INIT */ }
Функція USER_status:
/** * @brief Gets Disk Status * @param pdrv: Physical drive number (0..) * @retval DSTATUS: Operation status */ DSTATUS USER_status ( BYTE pdrv /* Physical drive number to identify the drive */ ) { /* USER CODE BEGIN STATUS */ if (pdrv) return STA_NOINIT; /* Supports only single drive */ return Stat; /* USER CODE END STATUS */ }
Функція USER_read:
/** * @brief Reads Sector(s) * @param pdrv: Physical drive number (0..) * @param *buff: Data buffer to store read data * @param sector: Sector address (LBA) * @param count: Number of sectors to read (1..128) * @retval DRESULT: Operation result */ DRESULT USER_read ( BYTE pdrv, /* Physical drive nmuber to identify the drive */ BYTE *buff, /* Data buffer to store read data */ DWORD sector, /* Sector address in LBA */ UINT count /* Number of sectors to read */ ) { /* USER CODE BEGIN READ */ if (pdrv || !count) return RES_PARERR; if (Stat & STA_NOINIT) return RES_NOTRDY; if (!(CardType & 4)) sector *= 512; /* Convert to byte address if needed */ SELECT(); /* CS = L */ if (count == 1) { /* Single block read */ if ((send_cmd(CMD17, sector) == 0) /* READ_SINGLE_BLOCK */ && rcvr_datablock(buff, 512)) count = 0; } else { /* Multiple block read */ if (send_cmd(CMD18, sector) == 0) { /* READ_MULTIPLE_BLOCK */ do { if (!rcvr_datablock(buff, 512)) break; buff += 512; } while (--count); send_cmd(CMD12, 0); /* STOP_TRANSMISSION */ } } DESELECT(); /* CS = H */ rcvr_spi(); /* Idle (Release DO) */ return count ? RES_ERROR : RES_OK; /* USER CODE END READ */ }
Функція USER_write:
/** * @brief Writes Sector(s) * @param pdrv: Physical drive number (0..) * @param *buff: Data to be written * @param sector: Sector address (LBA) * @param count: Number of sectors to write (1..128) * @retval DRESULT: Operation result */ #if _USE_WRITE == 1 DRESULT USER_write ( BYTE pdrv, /* Physical drive nmuber to identify the drive */ const BYTE *buff, /* Data to be written */ DWORD sector, /* Sector address in LBA */ UINT count /* Number of sectors to write */ ) { /* USER CODE BEGIN WRITE */ /* USER CODE HERE */ if (pdrv || !count) return RES_PARERR; if (Stat & STA_NOINIT) return RES_NOTRDY; if (Stat & STA_PROTECT) return RES_WRPRT; if (!(CardType & 4)) sector *= 512; /* Convert to byte address if needed */ SELECT(); /* CS = L */ if (count == 1) { /* Single block write */ if ((send_cmd(CMD24, sector) == 0) /* WRITE_BLOCK */ && xmit_datablock(buff, 0xFE)) count = 0; } else { /* Multiple block write */ if (CardType & 2) { send_cmd(CMD55, 0); send_cmd(CMD23, count); /* ACMD23 */ } if (send_cmd(CMD25, sector) == 0) { /* WRITE_MULTIPLE_BLOCK */ do { if (!xmit_datablock(buff, 0xFC)) break; buff += 512; } while (--count); if (!xmit_datablock(0, 0xFD)) /* STOP_TRAN token */ count = 1; } } DESELECT(); /* CS = H */ rcvr_spi(); /* Idle (Release DO) */ return count ? RES_ERROR : RES_OK; /* USER CODE END WRITE */ } #endif /* _USE_WRITE == 1 */
Функція USER_ioctl:
/** * @brief I/O control operation * @param pdrv: Physical drive number (0..) * @param cmd: Control code * @param *buff: Buffer to send/receive control data * @retval DRESULT: Operation result */ #if _USE_IOCTL == 1 DRESULT USER_ioctl ( BYTE pdrv, /* Physical drive nmuber (0..) */ BYTE cmd, /* Control code */ void *buff /* Buffer to send/receive control data */ ) { /* USER CODE BEGIN IOCTL */ DRESULT res; BYTE n, csd[16], *ptr = buff; WORD csize; if (pdrv) return RES_PARERR; res = RES_ERROR; if (cmd == CTRL_POWER) { switch (*ptr) { case 0: /* Sub control code == 0 (POWER_OFF) */ if (chk_power()) power_off(); /* Power off */ res = RES_OK; break; case 1: /* Sub control code == 1 (POWER_ON) */ power_on(); /* Power on */ res = RES_OK; break; case 2: /* Sub control code == 2 (POWER_GET) */ *(ptr + 1) = (BYTE) chk_power(); res = RES_OK; break; default: res = RES_PARERR; } } else { if (Stat & STA_NOINIT) return RES_NOTRDY; SELECT(); /* CS = L */ switch (cmd) { case GET_SECTOR_COUNT: /* Get number of sectors on the disk (DWORD) */ if ((send_cmd(CMD9, 0) == 0) && rcvr_datablock(csd, 16)) { if ((csd[0] >> 6) == 1) { /* SDC ver 2.00 */ csize = csd[9] + ((WORD) csd[8] << 8) + 1; *(DWORD*) buff = (DWORD) csize << 10; } else { /* MMC or SDC ver 1.XX */ n = (csd[5] & 15) + ((csd[10] & 128) >> 7) + ((csd[9] & 3) << 1) + 2; csize = (csd[8] >> 6) + ((WORD) csd[7] << 2) + ((WORD) (csd[6] & 3) << 10) + 1; *(DWORD*) buff = (DWORD) csize << (n - 9); } res = RES_OK; } break; case GET_SECTOR_SIZE: /* Get sectors on the disk (WORD) */ *(WORD*) buff = 512; res = RES_OK; break; case CTRL_SYNC: /* Make sure that data has been written */ if (wait_ready() == 0xFF) res = RES_OK; break; case MMC_GET_CSD: /* Receive CSD as a data block (16 bytes) */ if (send_cmd(CMD9, 0) == 0 /* READ_CSD */ && rcvr_datablock(ptr, 16)) res = RES_OK; break; case MMC_GET_CID: /* Receive CID as a data block (16 bytes) */ if (send_cmd(CMD10, 0) == 0 /* READ_CID */ && rcvr_datablock(ptr, 16)) res = RES_OK; break; case MMC_GET_OCR: /* Receive OCR as an R3 resp (4 bytes) */ if (send_cmd(CMD58, 0) == 0) { /* READ_OCR */ for (n = 0; n < 4; n++) *ptr++ = rcvr_spi(); res = RES_OK; } default: res = RES_PARERR; } DESELECT(); /* CS = H */ rcvr_spi(); /* Idle (Release DO) */ } return res; /* USER CODE END IOCTL */ } #endif /* _USE_IOCTL == 1 */
Демо код
Відкриваємо файл stm32f1xx_it.c і до секції /* USER CODE 0 */ додаємо рядок:
/* USER CODE BEGIN 0 */ extern void sdcard_systick_timerproc(void); /* USER CODE END 0 */
А до функції "SysTick_Handler" додаємо виклик функції "sdcard_systick_timerproc":
void SysTick_Handler(void) { /* USER CODE BEGIN SysTick_IRQn 0 */ /* USER CODE END SysTick_IRQn 0 */ HAL_IncTick(); HAL_SYSTICK_IRQHandler(); /* USER CODE BEGIN SysTick_IRQn 1 */ sdcard_systick_timerproc(); /* USER CODE END SysTick_IRQn 1 */ }
І нарешті відкриваємо файл main.c нашого проекту і в секцію /* USER CODE 2 */ додаємо такий демо-код:
/* USER CODE BEGIN 2 */ //-------------SD DEMO START----------------- char buffer[512]; static FATFS g_sFatFs; FRESULT fresult; FIL file; int len; UINT bytes_written; HAL_GPIO_WritePin(LED_RED_GPIO_Port, LED_RED_Pin, GPIO_PIN_SET); fresult = f_mount(&g_sFatFs, "0:", 0); //mount SD card fresult = f_open(&file, "testfile.txt", FA_OPEN_ALWAYS | FA_WRITE); //open file on SD card fresult = f_lseek(&file, file.fsize); //go to the end of the file len = sprintf(buffer, "Hello, World!\r\nThis is demonstration write on SD Card\r\n"); //generate some string fresult = f_write(&file, buffer, len, &bytes_written); //write data to the file fresult = f_close(&file); HAL_GPIO_WritePin(LED_RED_GPIO_Port, LED_RED_Pin, GPIO_PIN_RESET); //-------------SD DEMO END----------------- /* USER CODE END 2 */
Компілюємо проект, заливаємо до мікроконтролеру. Стартуємо мікроконтролер. Можна декілька разів перезавантажити. При цьому світлодіод має блимнути. Тепер можна витягти флешку з SD Card Adapter і вставити її до ПК та пересвідчитись що файл "testfile.txt" з декількома текстовими рядками "Hello, World!" та "This is demonstration write on SD Card" існує.